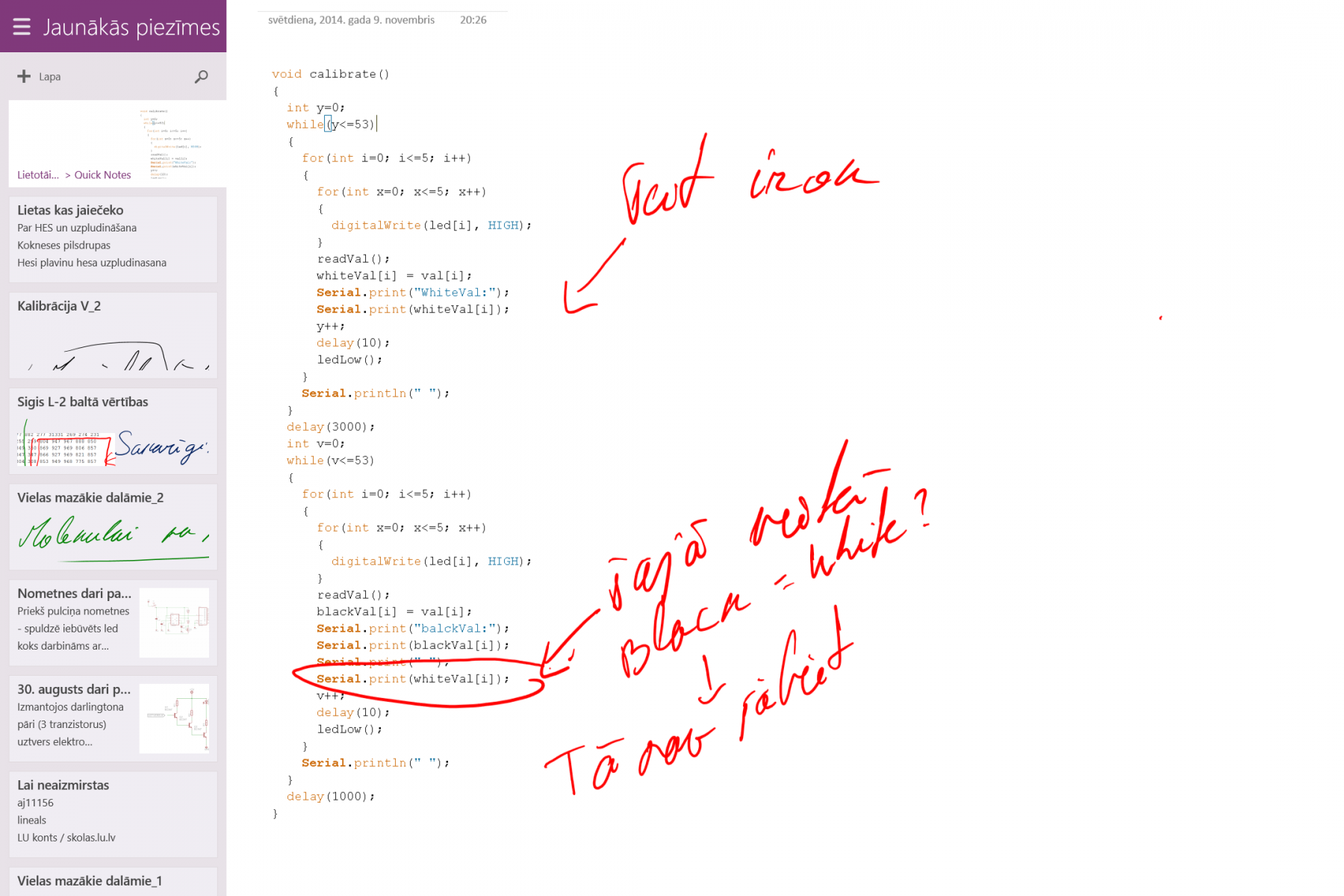
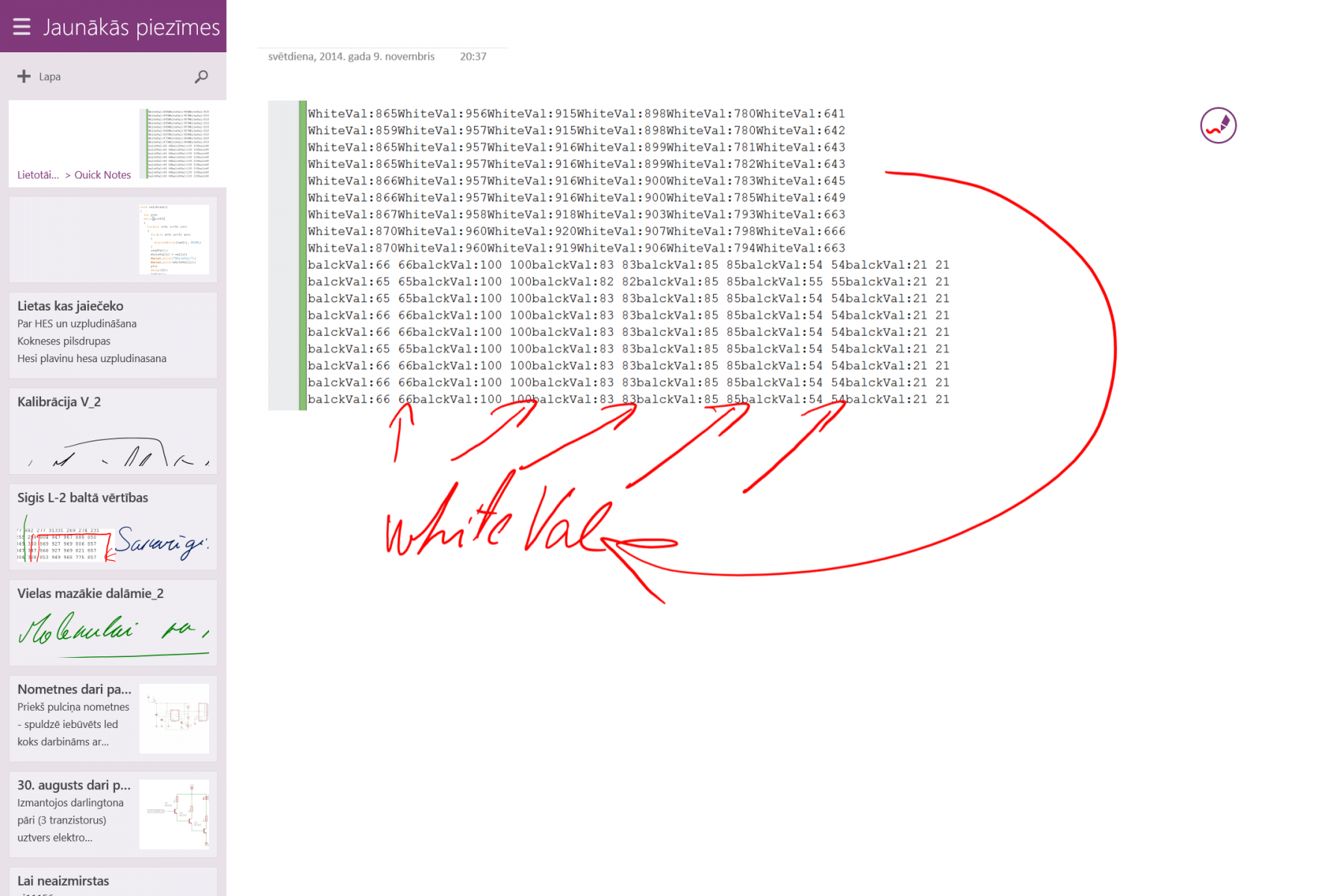
Kāds izpalīdzat! Taisu Sigim autokalibrāciju. jāieraksta ir 2 x6 vērības 6 baltās un 6 melnās.
viss kārtībā, kad ierakstu pirmās 6 baltās un atkārtoju to vairākas reizes, bet tad kad es pāreju nākošajā for loopā lai ierakstītu melnās arī baltās pārrakstās uz melnajām.
The AJ miniblogs
 0
0The AJ 09.11.2014. 20:41
 -1
-1Uzraksti normālus komentārus, tādus kurus var izlasīt.
- 0
- 0
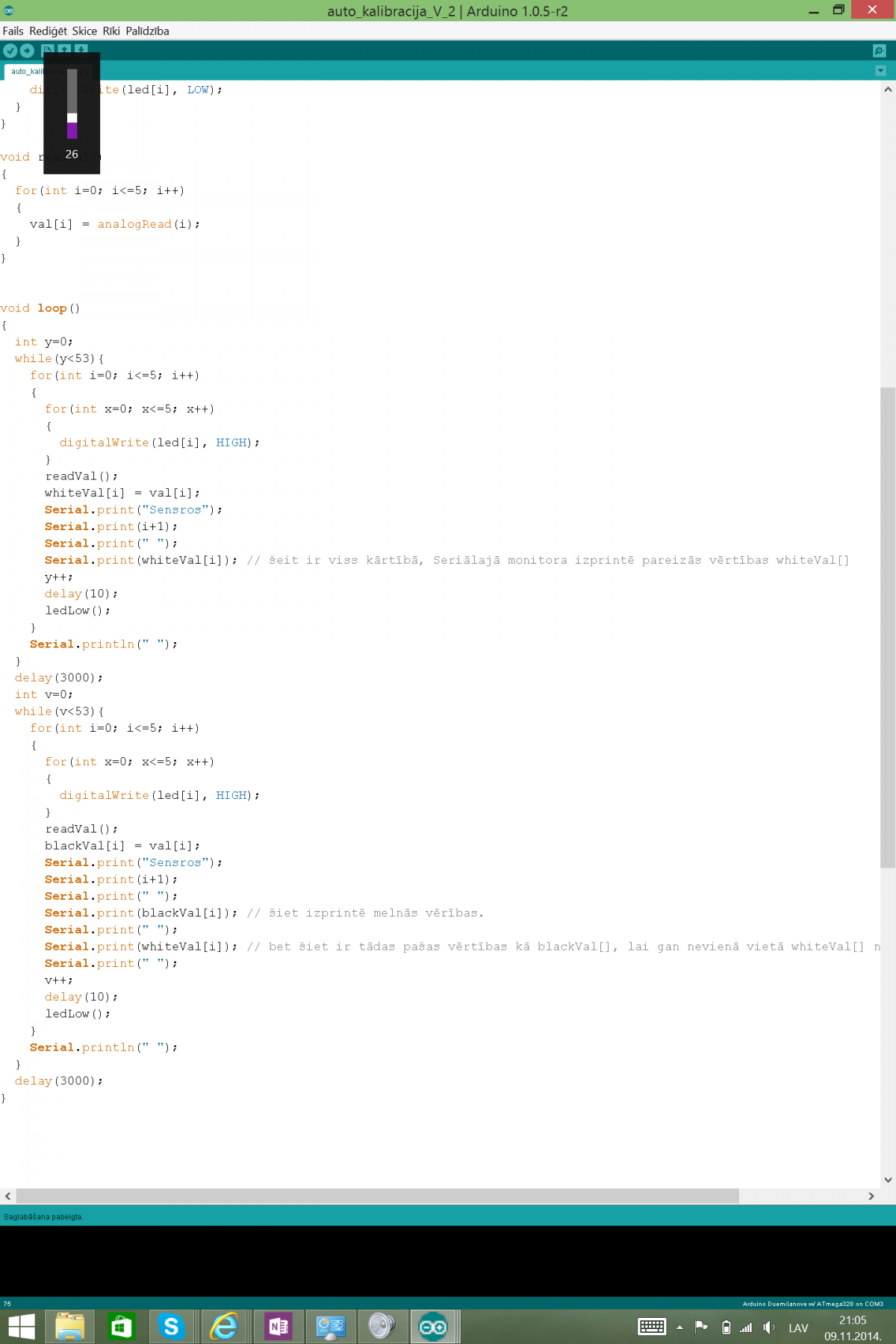
Īsumā ir 6 sensori(dajebkādi) kas ir pie analogajām ieejām. sensoru vērības tiek saglabātas data array val[]. vajag uzzināt vērtības priekš baltā laukuma un priekš melnā 9 respektīvi lielākās vērtības un mazākās. tiek nmolikt uz baltā laukuma tike vairākas reizes izpildīts cikls kurā saglabā vērtības whiteVal[] un tad tiek izpildīts otrs cikls kura laikā robots atrodas uz melnā laukuma, bet tikai šajā ciklā ne tikai saglabājas blackVal[] bet arī tiek pārrakstīts whiteVal[] , bet patiesībā white Val[] vajadzētu palikt neskartam.
šeit txt dokuments
http://1drv.ms/1410QD4

Ielogojies vai izveido profilu, lai komentētu!